Abstract
The article discusses innovative areas of development of forestry and agricultural machinery with intelligent control systems. Kinematics is considered using the example of a harvester with a multi-link manipulator and walking chassis. Systems of equations are presented that characterize the spatial position of the working and chassis equipment with a large number of degrees of freedom. For this purpose, many companies have set themselves the task of creating multifunctional robots that operate autonomously and are controlled remotely using cloud technologies with special software. Intelligent control systems currently being developed can significantly expand the technological capabilities of machines that were unavailable in the not so distant past. The use of robots allows the introduction of new highly efficient technologies in which a person will be relieved of heavy physical labor, work in hazardous conditions, aggressive environments, etc. As a result of using robots, significant savings in material and labor resources, increased labor productivity and reduced production costs can be achieved. Currently, the use of walking vehicles for cargo transportation, clearing rubble, conducting emergency rescue operations in undeveloped areas in off-road conditions, as well as military use is considered promising. An assessment of existing problems and development prospects is given.
Keywords
Agrobotagrobot, Innovative Directions, Technology, Autonomous Robot Platforms
1. Introduction
The innovative direction of development of many large companies producing forestry and agricultural machinery are projects related to the development of intelligent control systems, agrobots, autonomous robot platforms with various working equipment and installed on various running systems.
Many engineering giants set out to create multifunctional robots that work autonomously and are controlled remotely through the use of cloud technologies using special software.
The use of robots makes it possible to introduce new highly efficient technologies in which a person will be spared from hard physical labor, work in dangerous conditions, aggressive environments, etc. As a result of the use of robots, significant savings in material and labor resources, increased productivity and reduced production costs can be achieved.
Environmental factors are also fundamental ideas in the development of robotic tools: reducing soil damage, reducing carbon dioxide emissions into the atmosphere, etc.
Currently, robotic tools developed and implemented in forestry and agriculture are very diverse. For example, the company FlierSystems (the Netherlands) presents on the market RoBoPlant – a robot for planting flowers and transplanting plants
.
The company AutonomousTractor (North Dakota) produces a modular robotic tractor without a control cabin
.
Agrobot (Spain) has developed Agrobot SW6010 and AGSHydro – a hydroponic system for growing and harvesting strawberries
,
Figure 1.
Wall-Ye company (France) recommends Wall-Ye 1000 mobile- a robot for pruning plants
.
EcoRobotix (Switzerland) has designed lightweight autonomous robots for agricultural work. It is a robotic platform for weeding beds, works on the basis of weed recognition algorithms, has robotic arms and wireless communication
.
The company Amazone-Werkeg GmbH, (Germany) produces Amazone-BoschBoniRob, a lightweight field robot designed for weeding and fertilizing
,
Figure 2.
Figure 1. Agrobotagrobot SW6010.
Figure 2. Amazone-BoschBoniRob Field Robot.
Figure 3. HarvesterPlusjack.
The leading manufacturers of automatic driving systems for agricultural machinery are JohnDeere (USA), AutonomousTractorCorporation (USA), AGCOCorporation (USA) and CNHIndustrial (Netherlands)
| [7] | Truflyak E. V. The main elements of the precision farming system / E. V. Truflyak. – Krasnodar: KubGAU, 2016. – 39 p. |
| [8] | Truflyak E. V. Systems of parallel driving / E. V. Truflyak. – Krasnodar: KubGAU, 2016. – 72 p. |
[7, 8].
The intelligent control systems currently being developed make it possible to significantly expand the technological capabilities of machines that were not available in the not-so-distant past.
For example, the Advanced Research and Development Department of Timberjack developed the HarvesterPlusjack in 1999,
Figure 3. In the 90s, the car was never put into production. Over time, Timberjack transformed into JohnDeere
, which became a leader in the development of intelligent navigation systems, control systems and software technology.
HarvesterPlusjack machine was distinguished by the complexity of the design and control system. However, it clearly demonstrated the advantages of a wheelless design: it could work on any steep and uneven surfaces, move in different directions and turn around on the spot. At the same time, the car practically leaves no traces of its movement on the ground.
A little later, the further development of automation and software allowed many companies to return to similar design solutions, in particular walking high-cross-country running systems.
Uniform and rectilinear movement of the machine body is ensured when moving on a surface with irregularities reaching the ground clearance of the machine.
The deformation of the soil in discrete zones of the impact of the supports of the links of the running system does not create significant areas of soil destruction, like a continuous track of wheeled and tracked vehicles. These properties of walking running systems have determined the areas of their use as aggregates for forestry and agricultural work.
Currently, it is considered promising to use walking vehicles for transporting goods, clearing debris, carrying out emergency rescue operations in undeveloped areas in off-road conditions, as well as use for military purposes.
The purpose of the study is to improve the technical level of agricultural and forestry equipment based on digital, intelligent-advising control systems, automation and robotization of production.
2. Materials and Methods
The difficulties of developing and implementing such structures are primarily related to the need to control a large number of degrees of freedom that provide the required kinematic and dynamic parameters.
Ensuring the specified operational properties of such equipment requires a reasonable and well-functioning control system. According to functions, structure and algorithms, the control system can be divided into three levels. The role of the highest first level of control is provided by the operator, setting the overall purpose of the machine, the type of work performed, the main parameters of the machine movement, such as the direction of movement and speed.
At the second tactical level, the control system, based on the movement parameters and tasks set by the operator, automatically generates the trajectory of the movement of working and running equipment.
The lower third level of the control system, using tracking systems and sensors, implements the program trajectories of individual mechanisms and provides feedback.
Progress in the field of automation and digitalization, the emergence of so-called intelligent control systems have created the basis for the development and implementation of many constructive solutions. The most difficult tasks solved by the agrobot management system include the following: review and processing of information about the environment and making decisions based on it.
For example, to organize the movement of a machine with a walking running system, the control system must have information about the possibility of placing supports in a particular area, not only depending on the shape of the surface, the slope, but also depending on its physical properties. The information support system of the machine must have a significant database and be able to distinguish the type of surface, rigidity, safety, determine, for example, whether a ledge will collapse when a support is placed on it, etc.
In general, the robot is built as a multipurpose system with redundancy, i.e. the mechanism has a kinematic scheme containing a greater number of degrees of mobility than is necessary to perform any work, which ensures versatility.
3. Results and Discussion
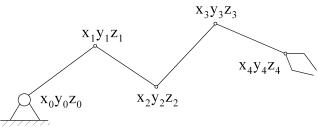
Figure 4 shows the kinematic scheme of the manipulator. Let's denote the coordinates of the hinges in accordance with the coordinate axes x
i, y
i, z
i. Each hinge has one or two angular degrees of freedom.
Figure 4. Kinematic diagram of the manipulator.
Let's make a system of algebraic equations with variables that characterize the spatial position of the hinges, i.e. the coordinates of the hinges:
(хi– xi+1)2+(yi–yi+1)2+(zi– zi+1)2=ℓi2(1)
i=0, 1, …, n,
where ℓi – lengths of the corresponding links of the manipulator; n – number of links.
In the above equation, the number of variables exceeds the number of coupling equations. The difference between the number of variables n and the number of equations is called the natural redundancy of the system.
The control problem can be solved by the method of redundant variables. If the kinematics of multi-link working or running equipment can be described by finite equations, then it is possible to determine the structure of equivalent differential equations with indeterminate coefficients, assigning which different movements of the system will be given.
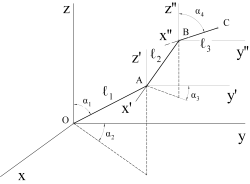
Structurally, the manipulator can be represented from links whose length Li (i= 1, 2, 3, 4) changes (equipped with hydraulic cylinders), and from links whose length ai, bi does not change. Setting the angles ai as variable coordinates, we express using the Pfaff equations:
2 LidLi+2aibisinαid αi=0, i=1,…4.(2)
Coordinates of the manipulator operation area (point C,
Figure 5) can be represented using equations:
where
Figure 5. Calculation scheme of the manipulator.
After differentiating the system of equation (
3), we obtain the Pfaff equations
| [10] | Differential equations in examples and problems. - Reference manual on higher mathematics. Volume 5 Boyarchuk A K, Golovach G P 2001. |
[10]
. By setting the speed of the hinge of the attachment of the grip of the manipulator (point C), you can express:
(4)
where Qij – function αi (i=1, 2, 3, 4).
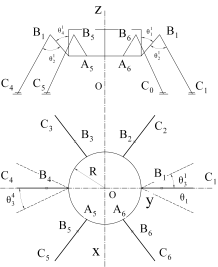
Consider a walking running system. Let's imagine it as a kinematic scheme with six multi-link supports,
Figure 6. If the number of degrees of mobility of a multi-link support is equal to n, the differential equations describing its movement will take the form:
Fj(x1,…,xn)=0, j=1, 2, …m, n≥m,(5)
. (6)
The accepted design parameters of the running system will be limited by the general geometric dimensions of the mechanism, the mounting platform of the working equipment, etc.
Figure 6. Calculation scheme of the manipulator.
Using finite algebraic equations, we describe the kinematics of running equipment. The points Ai (i=1 ... 6) are the hinges for attaching the links of the running equipment to the platform. At these points there are two degrees of freedom –angles θ1i and θ3i.
At the points Вi (i = 1 ... 6), the third hinges of the links with the same degree of mobility are placed with the angles θ2i (i=1, ..., 6). The segments АiBi =ℓ1, ВiCi =ℓ2 are constant and the same for all links.
Let's determine the coordinates of the end points of the links of the running system through the angles θ1i, θ2i, θ3i. The radius of the machine platform is R.
The equation of motion of the running system has the: form:
(7)
where the coefficients ki′ and ki′′ take into account the difference in the location of the hinge of the link of the running system.
Given the platform equations:
(8)
where x0, y0, z0 – coordinates of the center of the platform; a, b, c, d– platform plane parameters.
4. Conclusions
By setting the coordinates of these points and the plane parameters, you can fully determine the position of the platform. Using the systems of equations (
7) and (
8), it is also possible to construct a system of differential equations with indefinite coefficients for constructing algorithms for controlling the actuators of the hinges θ
1i, θ
2i, θ
3i (i=1, …, 6), taking into account the parameters of the platform movement, the movement variant and the terrain.
The maximum number of equations describing the system is 18 with 22 variables. If we calculate the time function when determining the coordinates x0, y0, z0, then we will have a system with 19 variables (θ1i, θ2i, θ3i and time t).
To ensure reliability, it is necessary to plan several options for ensuring movement, and in case of failure of hinges or links, rebuild the algorithm by using the capabilities of flexible structures with redundancy.
Automation and robotization of the agro–industrial complex is a global trend that is gaining momentum every year. The development of agro-robotics will largely depend on the unification of different areas of science, its related branches: materials science, computer technology, electronics, engineering, etc.
The article was prepared with the support of the Ministry of Education and Science of the Russian Federation within the framework of agreement No. 075-15-2021-032 dated March 23, 2021 on the grant in the form of a grant for the creation and development of an engineering center on the basis of an educational institution of higher education and (or) a scientific organization within the framework of the federal project "Development of infrastructure for scientific research and training" of the national project "Science and Universities".
Abbreviations
KubSAU | Kuban State Agrarian University, |
Author Contributions
Kadirjon Shavazov: Methodology, Project administration, Writing – original draft
Larisa Zhuravleva: Methodology, Supervision
Mihail Karpov: Formal Analysis, Supervision
Conflicts of Interest
The authors declare no conflict of interest.
Cite This Article
-
-
@article{10.11648/j.aff.20241306.15,
author = {Kadirjon Shavazov and Larisa Zhuravleva and Mihail Karpov},
title = {AGRO-robotics: Problems and Prospects
},
journal = {Agriculture, Forestry and Fisheries},
volume = {13},
number = {6},
pages = {260-264},
doi = {10.11648/j.aff.20241306.15},
url = {https://doi.org/10.11648/j.aff.20241306.15},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.aff.20241306.15},
abstract = {The article discusses innovative areas of development of forestry and agricultural machinery with intelligent control systems. Kinematics is considered using the example of a harvester with a multi-link manipulator and walking chassis. Systems of equations are presented that characterize the spatial position of the working and chassis equipment with a large number of degrees of freedom. For this purpose, many companies have set themselves the task of creating multifunctional robots that operate autonomously and are controlled remotely using cloud technologies with special software. Intelligent control systems currently being developed can significantly expand the technological capabilities of machines that were unavailable in the not so distant past. The use of robots allows the introduction of new highly efficient technologies in which a person will be relieved of heavy physical labor, work in hazardous conditions, aggressive environments, etc. As a result of using robots, significant savings in material and labor resources, increased labor productivity and reduced production costs can be achieved. Currently, the use of walking vehicles for cargo transportation, clearing rubble, conducting emergency rescue operations in undeveloped areas in off-road conditions, as well as military use is considered promising. An assessment of existing problems and development prospects is given.
},
year = {2024}
}
 Copy
|
Copy
|
 Download
Download
-
TY - JOUR
T1 - AGRO-robotics: Problems and Prospects
AU - Kadirjon Shavazov
AU - Larisa Zhuravleva
AU - Mihail Karpov
Y1 - 2024/11/29
PY - 2024
N1 - https://doi.org/10.11648/j.aff.20241306.15
DO - 10.11648/j.aff.20241306.15
T2 - Agriculture, Forestry and Fisheries
JF - Agriculture, Forestry and Fisheries
JO - Agriculture, Forestry and Fisheries
SP - 260
EP - 264
PB - Science Publishing Group
SN - 2328-5648
UR - https://doi.org/10.11648/j.aff.20241306.15
AB - The article discusses innovative areas of development of forestry and agricultural machinery with intelligent control systems. Kinematics is considered using the example of a harvester with a multi-link manipulator and walking chassis. Systems of equations are presented that characterize the spatial position of the working and chassis equipment with a large number of degrees of freedom. For this purpose, many companies have set themselves the task of creating multifunctional robots that operate autonomously and are controlled remotely using cloud technologies with special software. Intelligent control systems currently being developed can significantly expand the technological capabilities of machines that were unavailable in the not so distant past. The use of robots allows the introduction of new highly efficient technologies in which a person will be relieved of heavy physical labor, work in hazardous conditions, aggressive environments, etc. As a result of using robots, significant savings in material and labor resources, increased labor productivity and reduced production costs can be achieved. Currently, the use of walking vehicles for cargo transportation, clearing rubble, conducting emergency rescue operations in undeveloped areas in off-road conditions, as well as military use is considered promising. An assessment of existing problems and development prospects is given.
VL - 13
IS - 6
ER -
Copy
|
Download